Technologien
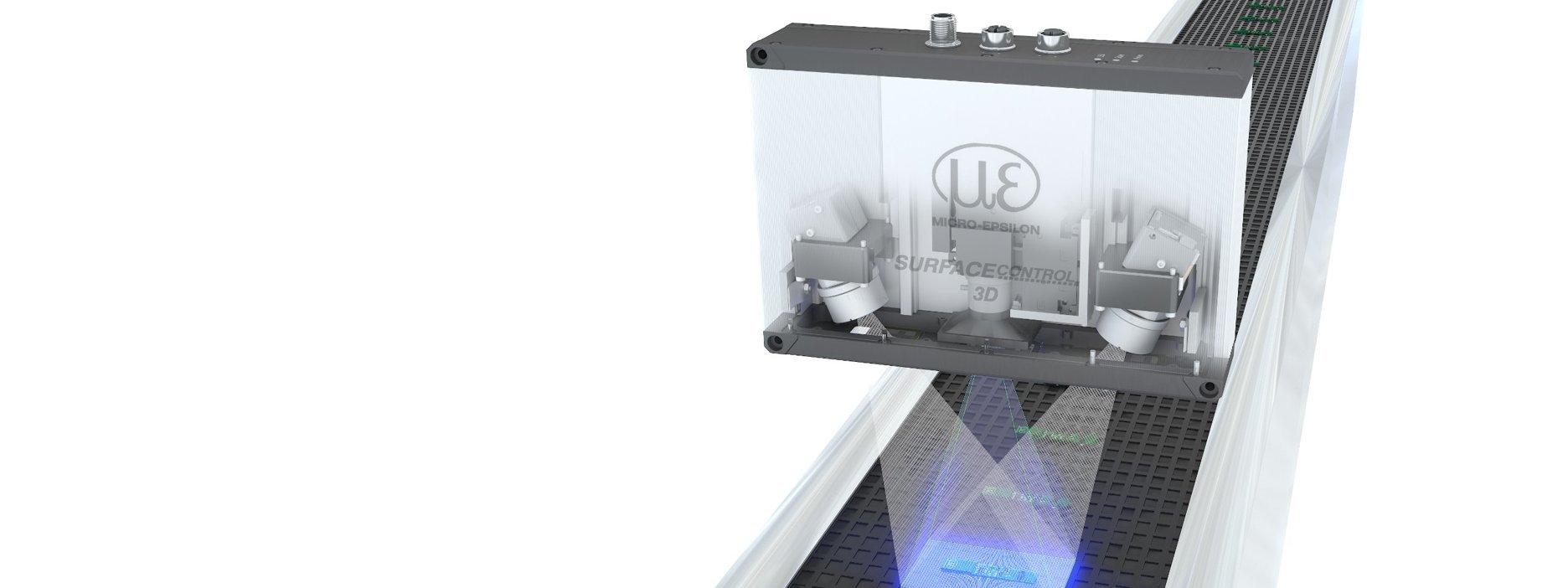
Die surfaceCONTROL 3D Sensoren arbeiten nach dem Prinzip der optischen Triangulation mittels Streifenlichtprojektion. Mithilfe eines Matrix-Projektors wird eine Musterfolge auf die Prüfobjektoberfläche projiziert. Das von der Oberfläche diffus reflektierte Licht der Muster wird mit zwei Kameras erfasst. Aus den aufgenommenen Bildfolgen und der Kenntnisse der Anordnung der beiden Kameras zueinander wird die dreidimensionale Oberfläche des Prüfobjekts berechnet.
Die so entstandene 3D-Punktewolke kann anschließend ausgewertet werden. Eine besondere Herausforderung stellt dabei die objektive Bewertung von Oberflächen dar. Hierfür haben wir verschiedene Analyseverfahren entwickelt.
Die Erfassung der Oberfläche erfolgt mit 3D-Sensoren. Die Sensoren bestehen aus mindestens zwei Kameras und einem Projektor. Die Kameras werden mit einem speziellen Kalibrierfeld kalibriert, d.h. die Lage und Ausrichtung der Kameras sowie einige weitere Parameter werden berechnet.
Die mit dem Projektor projizierten Streifenmuster dienen zum Finden identischer Punkte in beiden Kameras. Dafür werden das Gray-Code- und das Phasen-Shift-Verfahren eingesetzt. Durch Triangulation werden anschließend die x-, y- und z-Koordinaten der Oberfläche berechnet und in einer 3D-Punktewolke abgelegt.
Obwohl Auditoren einen großen Teil der Oberflächenfehler sicher und schnell erkennen, ist die visuelle Beurteilung häufig subjektiv und von mehreren Faktoren abhängig. Ziel einer Oberflächeninspektion ist es, eine objektive und reproduzierbare Bewertung der Abweichungen vorzunehmen, um sicher und schnell Entscheidungen hinsichtlich Bauteiltoleranzen treffen zu können. Deshalb haben wir verschiedene Verfahren entwickelt, mit denen die relevanten Abweichungen von Oberflächen gezielt erkannt und objektiv bewertet werden können. Weitere Informationen zu den verwendeten Analyseverfahren erhalten Sie im Abschnitt Auswerteverfahren.
Herausforderung
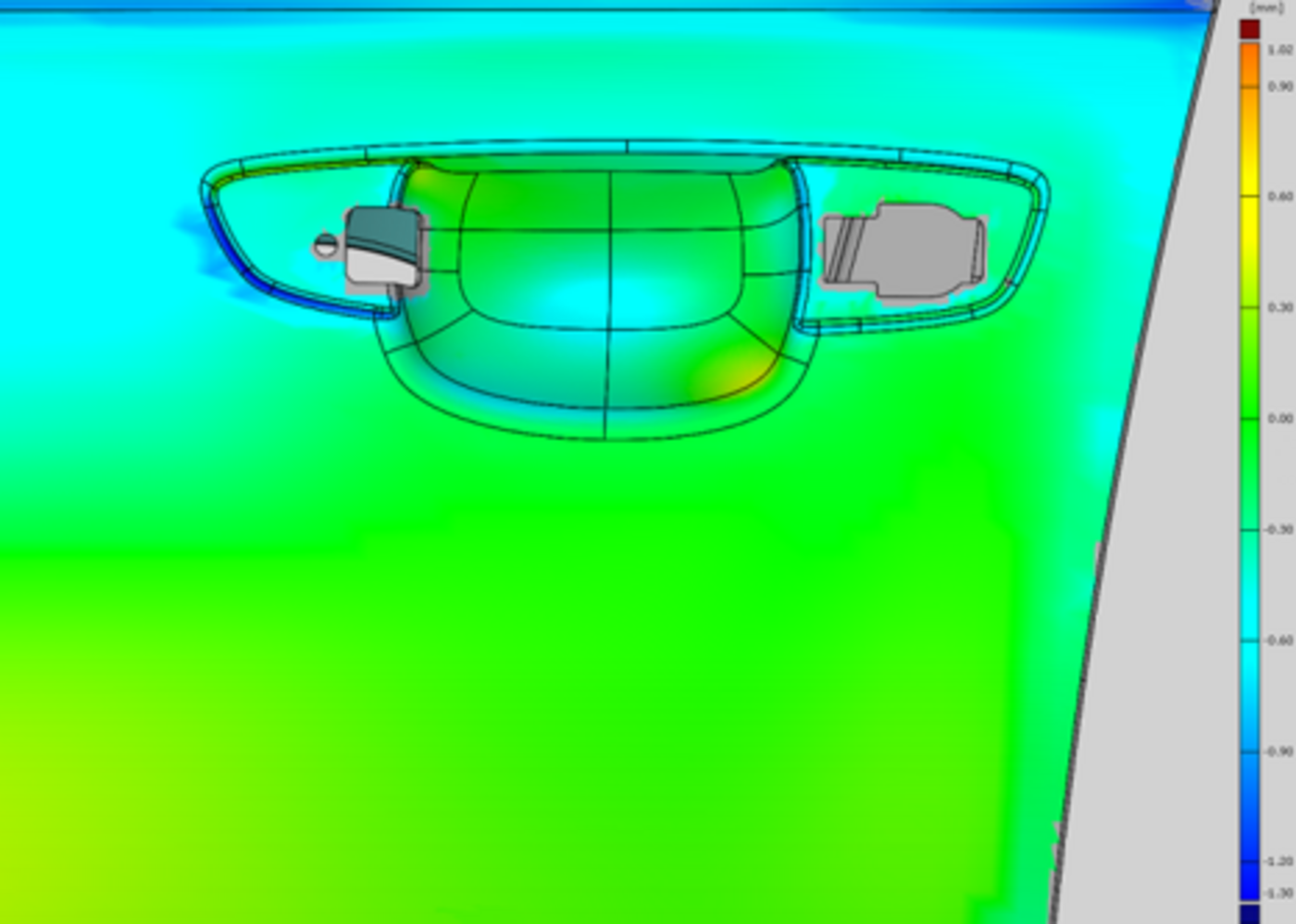
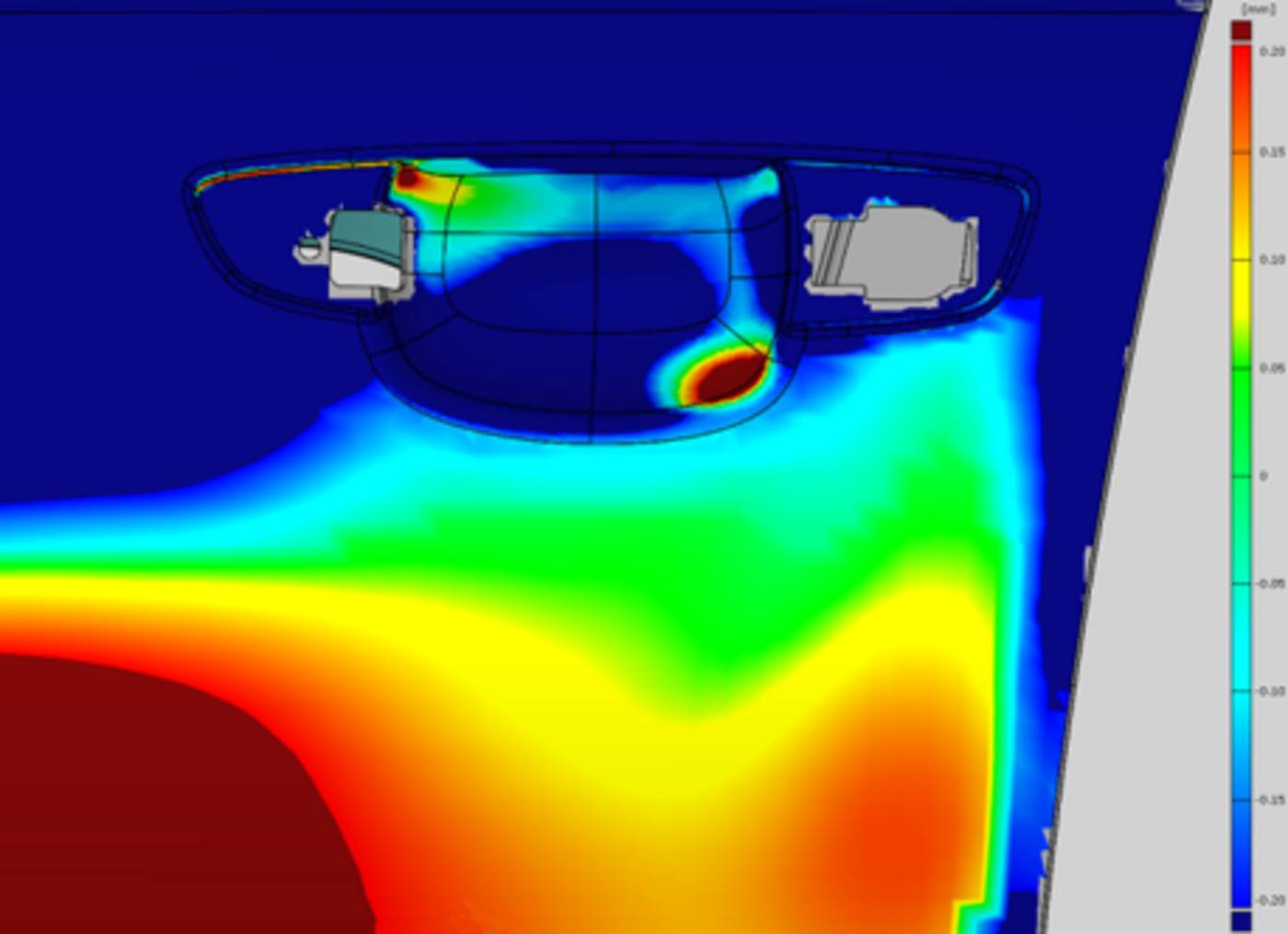
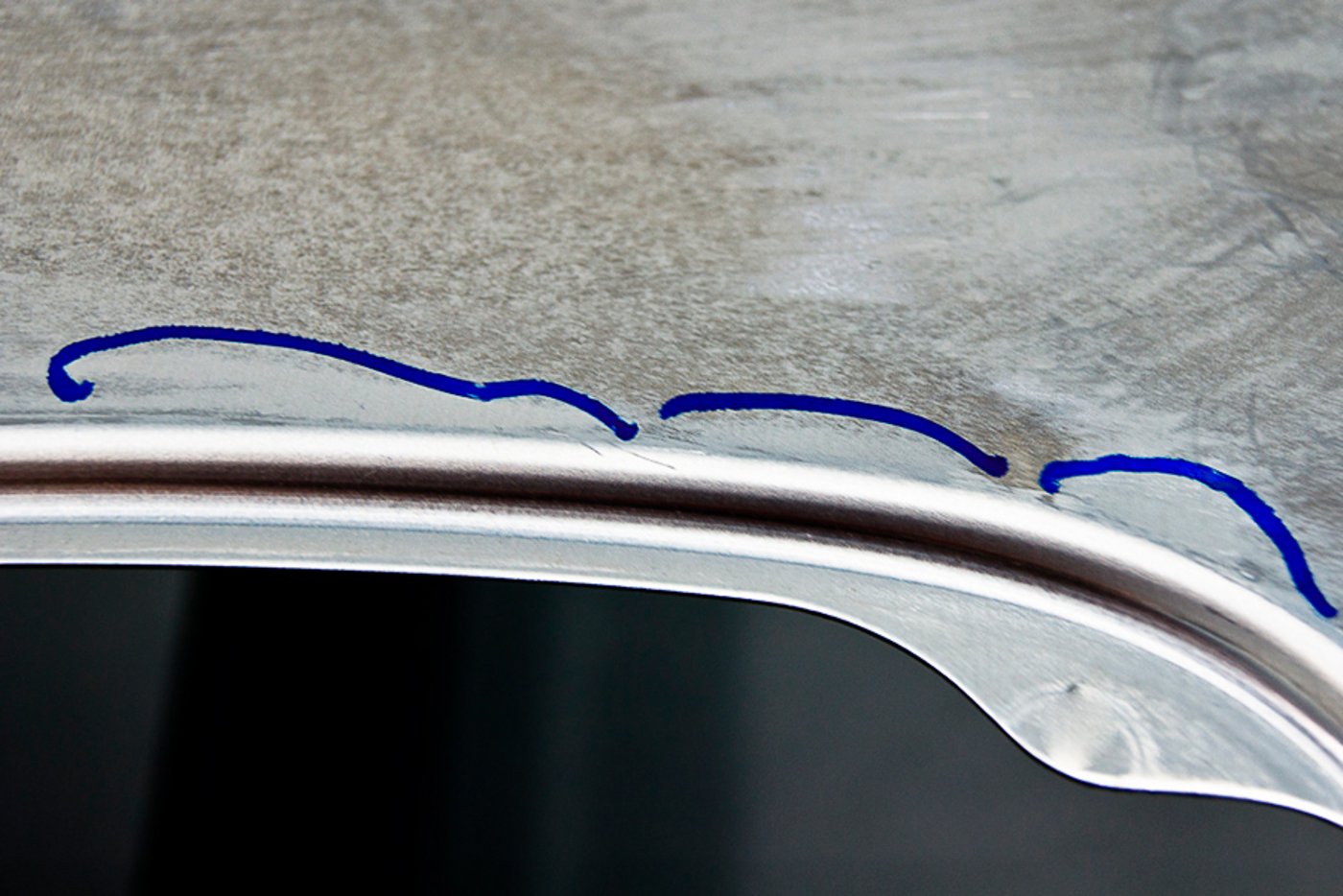
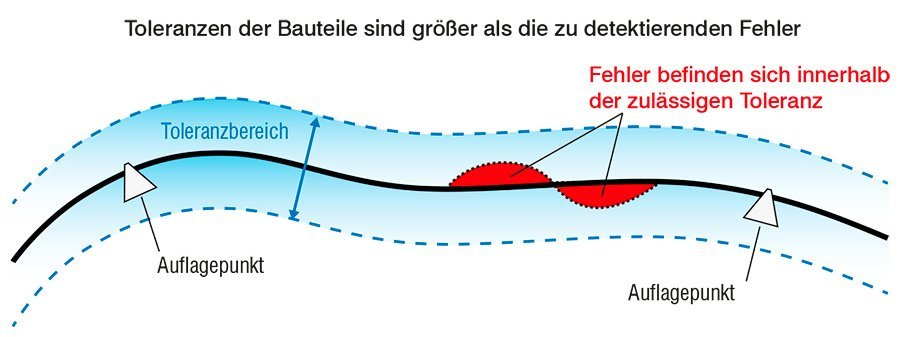
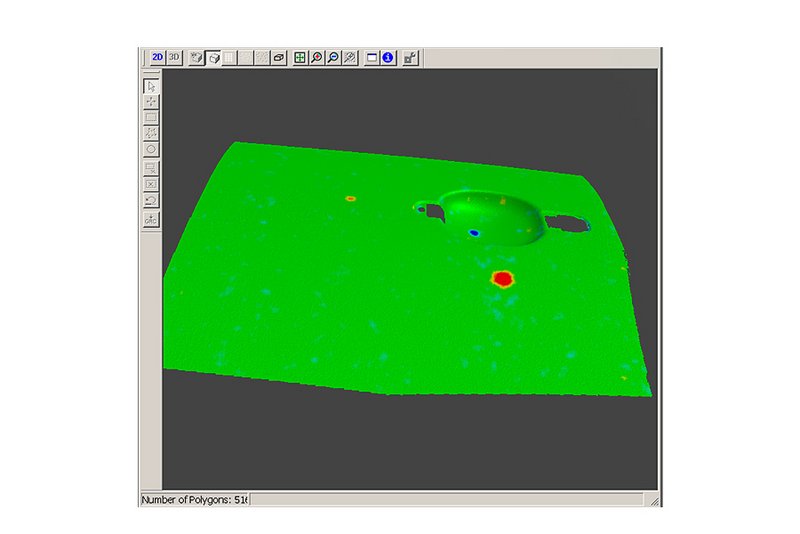
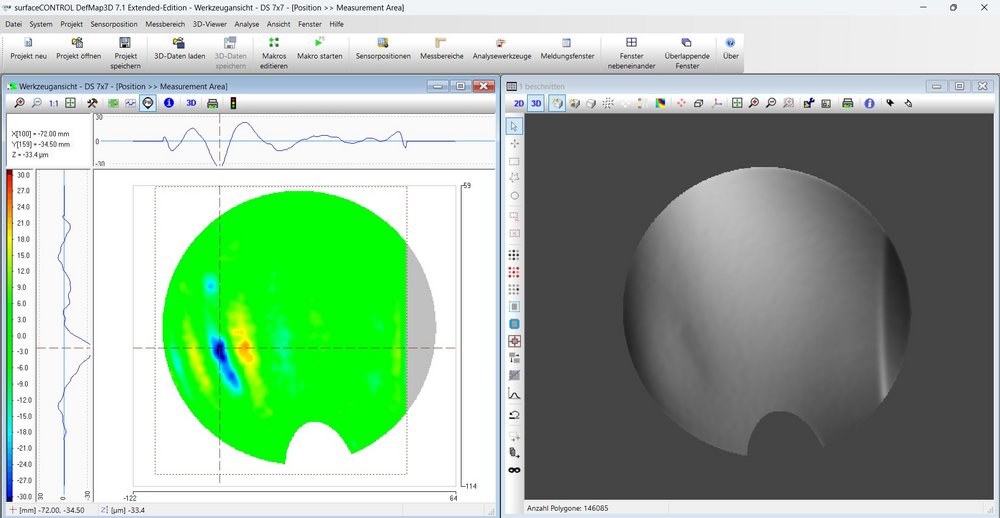
Die zu erkennenden Abweichungen haben eine Höhe/Tiefe, die häufig deutlich kleiner ist, als die geometrischen Toleranzen der Bauteile. Bei einem Vergleich gegen einen CAD-Datensatz werden die geometrischen Toleranzen sichtbar; die kleinen lokalen Fehler bleiben jedoch im Verborgenen. Im nachfolgenden Beispiel ist dies gut anhand von zwei kleinen Dellen im Bereich der Türgriffmulde einer Autotür zu erkennen.
Um die verschiedensten Defekte auf unterschiedlichen Oberflächenformen stets bestmöglich zu finden, haben wir mehrere Auswerteverfahren entwickelt. Somit steht Ihnen ein optimal passendes Werkzeug zur Verfügung, egal ob kleine kurzwellige Fehler oder große langwellige Unstetigkeiten erkannt und objektiv bewertet werden sollen.
Bei den Auswerteverfahren Digitaler Master, Digitale Hülle und Digitaler Abziehstein erhalten Sie als Ergebnis eine DefectMap in der alle Abweichungen mit ihrer lateralen Ausdehnung und der Angabe der Höhe/Tiefe ausgegeben werden. Rot bedeutet dabei eine Abweichung nach oben, blau nach unten. Mit Hilfe individuell festlegbarer Grenzwerte werden anschließend die gefundenen Abweichungen automatisch bewertet. Zusätzlich können die Ergebnisse in einem Prüfbericht ausgegeben werden.
Im ersten Schritt werden Bauteile ausgewählt, die von den Kunden oder der eigenen Qualitätssicherung als iO akzeptiert werden. Die Oberflächen dieser Bauteile werden mit dem 3D-Sensor erfasst. Aus den berechneten 3D-Daten werden Parameter über zulässige Oberflächenformen berechnet und in einem Assoziativspeicher abgelegt. Dahinter verbirgt sich ein neuronales Netz, das mit den Daten trainiert wird. Im Inspektionsbetrieb wird die Oberfläche des Prüfteils zunächst mit dem Sensor erfasst. Anschließend wird das Prüfteil aus den im Assoziativspeicher abgelegten fehlerfreien Bauteilen als individueller Master nachgebildet. Gegen diesen Master wird dann verglichen. Wenn zwischen dem berechneten Master und dem Prüfteil keine Differenz vorhanden ist, ist das Prüfteil fehlerfrei. Abweichungen werden in einer DefectMap farbig dargestellt. Dieses Verfahren eignet sich besonders für die Serienprüfung.
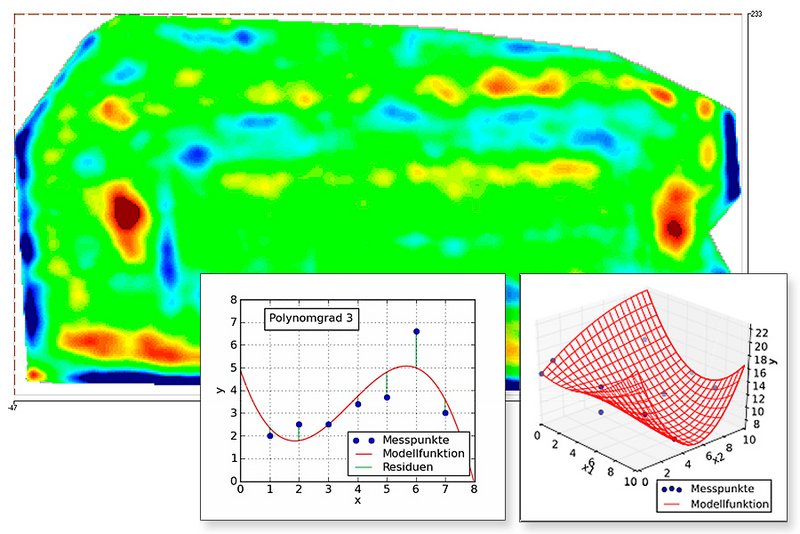
Die Digitale Hülle beruht auf einer Polynom-Approximation. Dabei werden die 3D-Daten der Oberfläche durch mathematische Funktionen (Polynome) beschrieben. Abhängig von ihrem Grad haben die Polynome die Fähigkeit, sich dem Verlauf der Oberfläche unterschiedlich anzupassen. Gegen die so berechnete Form werden die 3D-Daten verglichen und etwaige Oberflächenfehler als Unstetigkeiten erkannt. Dieses Verfahren eignet sich besonders für die schnelle Analyse ebener oder schwach gekrümmter Flächen.
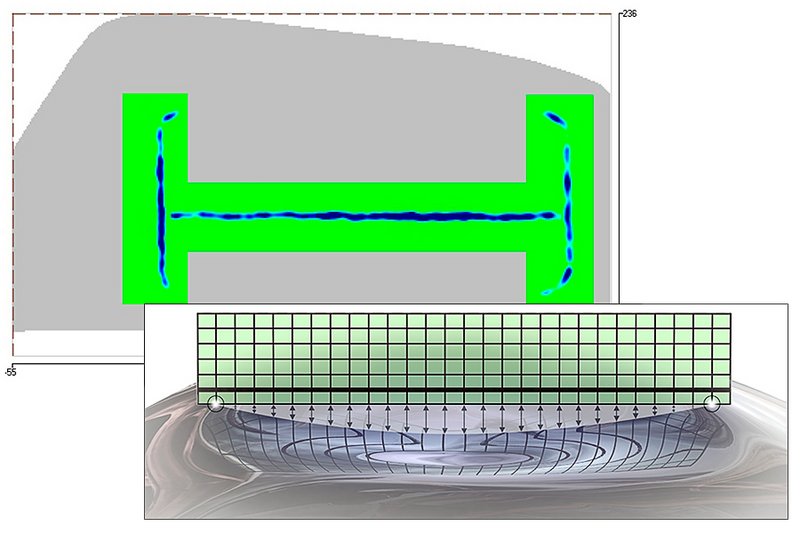
Der Digitale Abziehstein wird direkt auf den zuvor aufgenommenen 3D-Daten angewandt. Bei diesem Verfahren werden entlang einer Strecke in einer vorgegebenen Richtung die zwei höchsten Punkte bestimmt (Auflagepunkte). Anschließend wird der Abstand zwischen der Strecke und den 3D-Daten ermittelt.
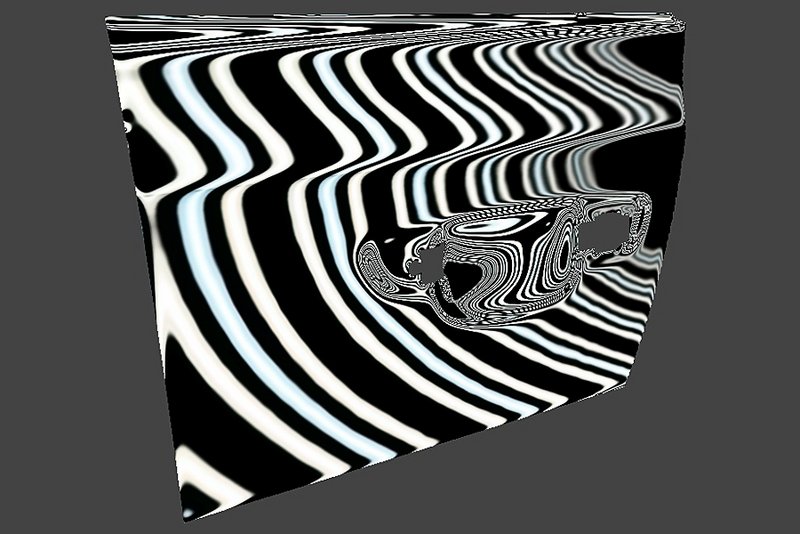
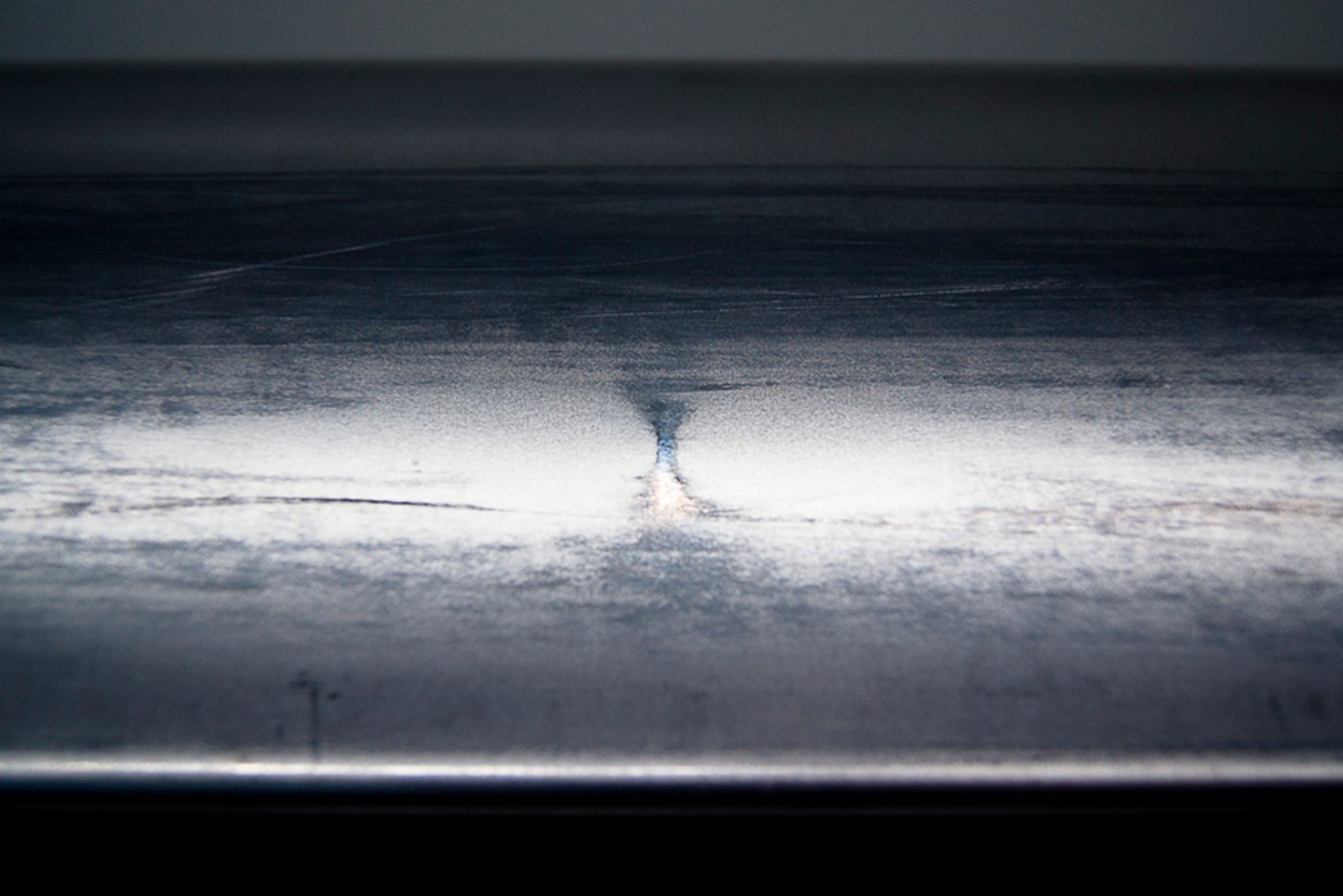
Sehr kleine lokale Abweichungen sind auf den Prüfstücken, insbesondere bei matten Oberflächen, häufig nur schwer zu erkennen oder zu ertasten. Um einen visuellen Eindruck über die Ausprägung der Abweichung zu bekommen, werden beispielsweise Karosserieteile schwarz glänzend lackiert und unter einer speziellen Beleuchtung zum Beispiel in einem Lichttunnel ausgespiegelt. Dieses Verfahren ist nicht auf allen Oberflächen anwendbar. Es erfordert einen hohen Aufwand und die Bauteile können hinterher nicht mehr weiter verwendet werden. Deshalb bietet das Werkzeug “Digitaler Lichttunnel” die Möglichkeit, die aufgenommenen 3D-Oberflächen mit definierten Eigenschaften (Farbe, Glanz) zu versehen und wahlweise mit einem diffusen Licht oder einem Lichtbalken auf dem Bildschirm auszuspiegeln. So werden ohne zusätzlichen Zeit- und Materialaufwand selbst kleinste Fehler sichtbar und können visuell beurteilt werden.
Neben einer Lösung für die Automatische OberflächenInspektion (AOI) kompletter Karosserien stehen aktuell zwei Softwarepakete für Ihre Mess- und Prüfaufgaben zur Verfügung: das leistungstarke Tool 3DInspect der Micro-Epsilon Gruppe sowie surfaceCONTROL DefMap3D mit umfangreichen Möglichkeiten zur Detektion und Analyse von 3D-Oberflächenfehlern.
Software zur Lösung von 3D-Mess- und Inspektionsaufgaben
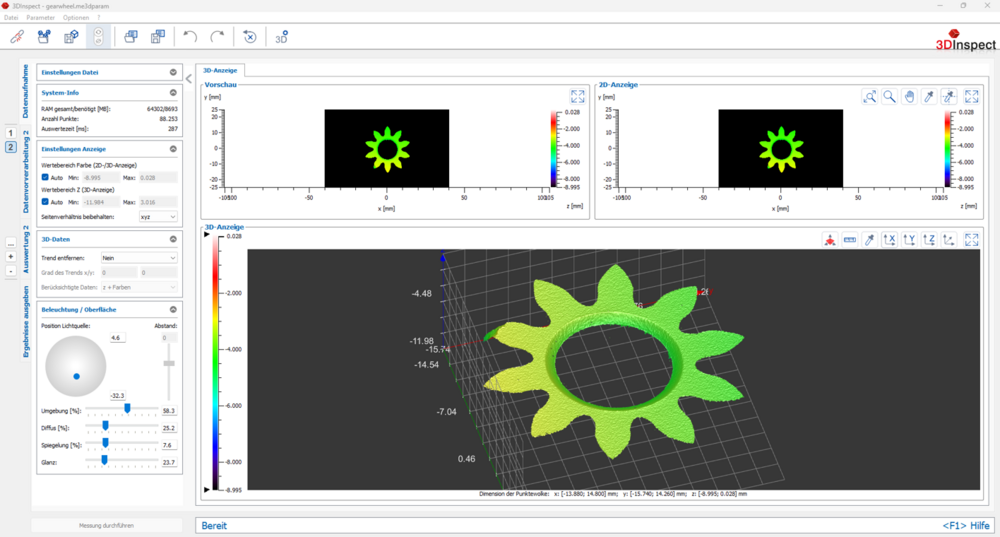
3DInspect ist ein einheitliches und bedienerfreundliches Softwaretool für alle 3D-Sensoren von Micro-Epsilon. Die Parametrierung der 3D-Sensoren und die Aufnahme der Messdaten erfolgt direkt aus der 3DInspect-Software heraus. Leistungsstarke Werkzeuge erlauben die Ausrichtung und Filterung der Punktewolke, die intuitive Erkennung und Auswahl relevanter Bereiche sowie die Kombination von Programmen. Die 3D-Punktewolken können beliebig weiterverarbeitet und ermittelte Messwerte an die Steuerung ausgegeben werden.
3DInspect überträgt die Messdaten vom Sensor über Ethernet auf einen PC und stellt diese dreidimensional auf dem Bildschirm dar. Zur Weiterverarbeitung, Auswertung und Beurteilung verfügt die Software über leistungsstarke Messprogramme. Die fertig definierten Messprogramme sind in die Kategorien „Datenvorverarbeitung“, „Objekte finden“ sowie „Objekte kombinieren“ unterteilt und erlauben vielfältige Einstellungsmöglichkeiten, z.B.:
Software für die individuelle Oberflächenanalyse
Die Software surfaceCONTROL DefMap3D ist die umfassende Softwarelösung für die Detektion und objektive Analyse von 3D-Oberflächenfehlern. Im Unterschied zu einem Vergleich gegen CAD-Daten bietet DefMap3D die Möglichkeit, schnell und einfach kleinste lokale Oberflächenformfehler zu erkennen und zu bewerten. Die Software beinhaltet alle Komponenten und Verfahren für die Konfiguration des 3D-Sensors surfaceCONTROL, die einfache Einrichtung der Prüfaufgabe und die schnelle Auswertung der 3D-Daten. Es stehen drei Auswerteverfahren zur Verfügung, um die verschiedensten Defekte auf unterschiedlichen Oberflächenformen stets bestmöglich zu finden. Darüber hinaus besteht die Möglichkeit einer visuellen Bewertung indem die 3D-Punktewolke mit definierten Eigenschaften (Farbe, Glanz) versehen und wahlweise mit einem diffusen Licht oder einem Lichtbalken auf dem Bildschirm ausgespiegelt wird. Die Ergebnisse können in einem umfangreichen Prüfbericht ausgegeben werden.